NERIC – Academic Materials
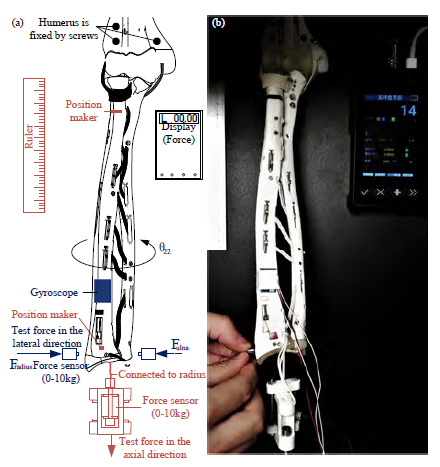
Enhancing the Performance of a Biomimetic
Robotic Elbow-and-Forearm System Through Bionics-Inspired Optimization.
Written by: Haosen Yang, Guowu Wei, Member – IEEE, Lei Ren, Member – IEEE.
Click the image to view in full.
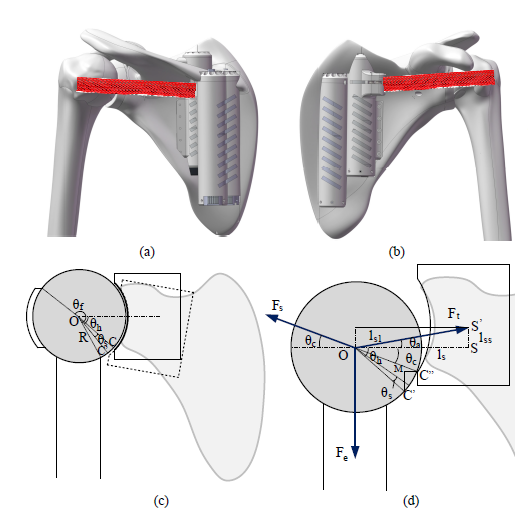
Development and Characteristics of a Highly
Biomimetic Robotic Shoulder Inspired by
Musculoskeletal Mechanical Intelligence.
Written by: Haosen Yang, Guowu Wei, Member – IEEE, Lei Ren, Member – IEEE.
Click the image to view in full.